17 de abril de 2017 - Tiempo de lectura 3 min
Epigenética y teoría de la evolución robótica
Por Editorial Vodafone Business
La robótica evolutiva es un área nuevo de investigación que se basa en los principios evolutivos de Darwin para desarrollar de forma automática robots autónomos. En un nuevo artículo de investigación publicado en Frontiers in Robótica & AI , los investigadores añaden más complejidad al campo, demostrando por primera vez que, al igual que en la evolución biológica, la evolución del robot humanoide se ve afectada por factores epigenéticos.
La epigenética, término atribuido a Conrad Waddington en 1945, se describe como como “la rama de la biología que estudia las interacciones causales entre los genes y sus productos que dan lugar al fenotipo”.
Basada en esta teoría, en robótica evolutiva se crearía una «reserva genética» artificial que produzca genomas, cada uno de los cuales codifica el sistema de control de un robot. Así, se permite a cada robot actuar y llevar a cabo tareas de acuerdo con su controlador «genéticamente» especificado, y el estado de forma del robot se clasifica de acuerdo a cómo de bien se lleva a cabo una tarea determinada.
Después a los robots se les permite reproducirse mediante el canje de material genético entre sí, comparable a la reproducción sexual biológica.
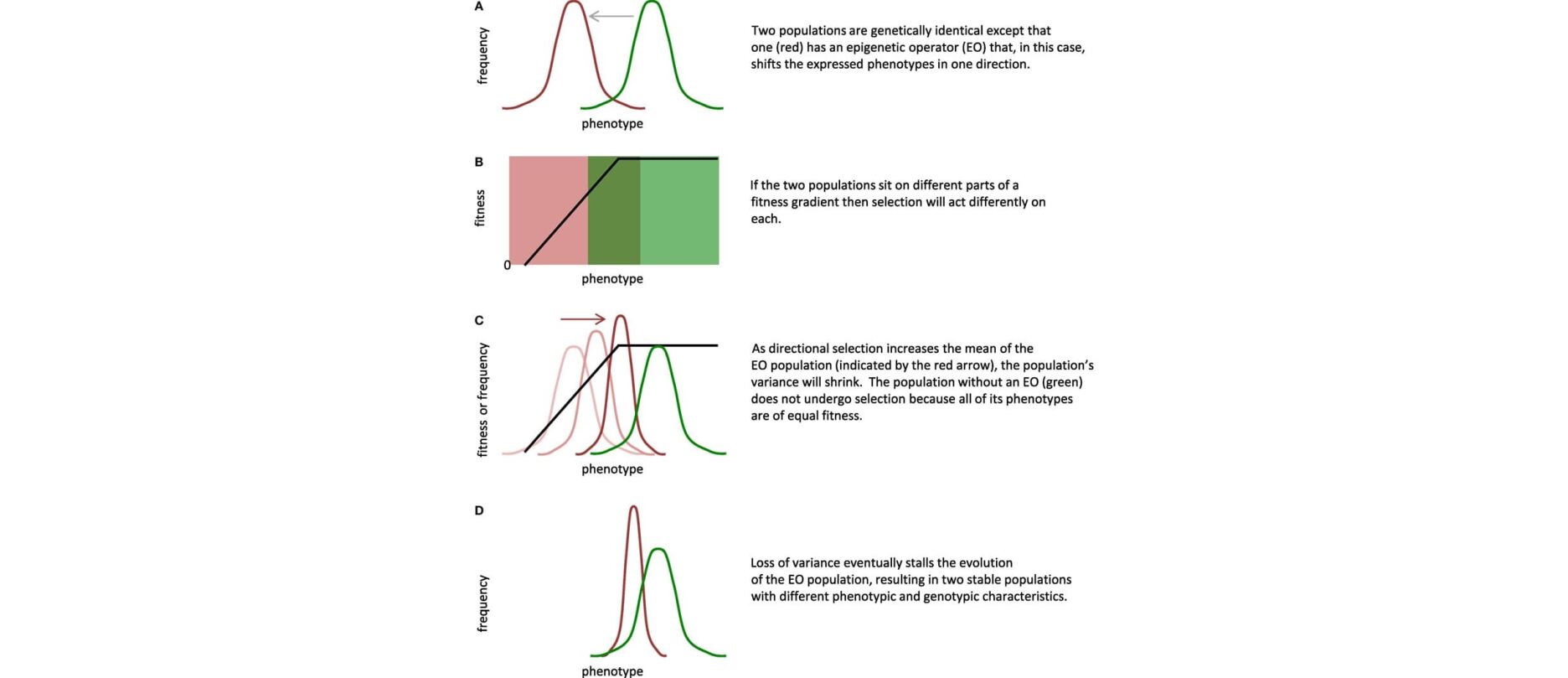
Sin embargo, los genomas de los organismos vivos también se ven afectados por el desarrollo, o reacción a eventos durante su vida, que conducen a cambios epigenéticos . En biología, esta interacción entre evolución y desarrollo se conoce como la evo-devo, que ha hecho hincapié en la importancia de los factores no genéticos en el fenotipo de un organismo.
Para los expertos en robótica, el reto evo-devo es crear sistemas físicos que incorporen las tres escalas de tiempo y los procesos inherentes a cada uno: El comportamiento, el desarrollo y la evolución. Debido a la complejidad de la construcción y la evolución de los robots físicos, se trata de una desafío de enormes proporciones en la búsqueda de la «evolución de las cosas», según dicen los autores del proyecto llevado a cabo entre Jake Brawer y Aaron Hill: «Como un primer paso hacia este objetivo, en este documento se crea un sistema físicamente modelado que nos permite examinar sistemáticamente cómo interactúan el desarrollo y los procesos evolutivos «. Mientras que los estudios anteriores se han centrado en los efectos de la evolución de los robots encarnados físicamente, esta es la primera vez que los investigadores también han tenido en cuenta el aspecto epigenético en este tipo de experimento. Un enfoque evo-devo explícito ha sido de gran ayuda en la evolución de las redes neuronales artificiales. «El desarrollo sirve como un nuevo tipo de evolución conductor junto con los factores genéticos de la mutación, la recombinación y la selección que facilitan la capacidad de evolución en agentes encarnados». —explican— «Observamos que lo que falta en robótica evolutiva no es el desarrollo en sí, sino el desarrollo en un lugar formado físicamente. Nosotros damos los primeros pasos hacia la combinación de los dos, mediante el examen de las interacciones de epigenética y los factores genéticos en la evolución de los robots físicamente encarnados y simulados. »
Buscando el especimen más fuerte entre los robots
En este experimento, la aptitud de los robots individuales se midió por lo bien que realizan dos tareas: captación de luz (phototaxis) y evitación de obstáculos; y se utilizó un algoritmo de apareamiento aleatorio para determinar qué «genomas» parentales deben ser combinados para producir la siguiente generación de robots.
Aquí, los genes consistieron en código binario que permitió diferentes cableados posibles del hardware del robot.
El fenotipo de la expresión física del genoma de los robots se modificó en cada generación mediante la alteración de su cableado de acuerdo con la nueva configuración genética. Esto se repitió hasta que se habían creado y calificado por la aptitud 10 generaciones de robots. Para complementar el experimento de robots físicos, el equipo también creó y evolucionó robots simulados, y comparó los resultados evolutivos de las poblaciones de robots físicos y simulados.
Los experimentos se llevaron a cabo hasta que los robots perdieron toda movilidad, ya que el algoritmo de apareamiento permitió individuos de baja aptitud que permanezcan en la reserva genética y se reproduzcan. Los resultados muestran que las poblaciones de robot con un factor epigenético evolucionaron de manera diferente a las poblaciones donde el desarrollo no se tuvo en cuenta.
Figure 2. Ana BBot, a mobile robot that is programmable using jumper wires to connect sensors and motors. (A) Front view, with photocells and IR range detectors. (B) Lateral (left) view, showing drive wheels. (C) Robot wired using jumpers. (D) Top view, showing circuit board unwired.
Editorial Vodafone Business
Nuestro objetivo es construir una sociedad centrada en el progreso socioeconómico. Creemos que la tecnología y la conectividad pueden ayudar a mejorar la vida de millones de personas y empresas. Tenemos el compromiso de hacerlo reduciendo nuestro impacto ambiental y construyendo una sociedad digital inclusiva que respeta nuestro planeta.