03 de septiembre de 2019 - Tiempo de lectura 2 min
Brazo robótico con Inteligencia Artificial para empaquetar cajas
Por Editorial Vodafone Business
Los científicos de computación de Rutgers utilizaron Inteligencia Artificial para controlar un brazo robótico que proporciona una forma más eficiente de empacar cajas, ahorrando tiempo y dinero a las empresas.
“Podemos lograr soluciones automatizadas y de bajo costo que se pueden implementar fácilmente. La clave es tomar decisiones de hardware mínimas pero efectivas y concentrarse en algoritmos y software robustos «, dijo el autor principal del estudio, Kostas Bekris, profesor asociado en el Departamento de Ciencias de la Computación de la Escuela de Artes y Ciencias de la Universidad de Rutgers en New Brunswick .
Bekris, Abdeslam Boularias y Jingjin Yu, todos profesores asistentes de ciencias de la computación, formaron un equipo para tratar múltiples aspectos del problema de empaquetado del robot de manera integrada a través del hardware, la percepción 3D y el movimiento robusto.
El estudio revisado por expertos de científicos se publicó recientemente en la Conferencia Internacional IEEE sobre Robótica y Automatización , donde fue finalista para el Premio al Mejor Paper en Automatización. El estudio coincide con la tendencia cada vez mayor de implementar robots para realizar tareas de logística, ventas y almacenamiento. Los avances en robótica se están acelerando a un ritmo sin precedentes debido a los algoritmos de aprendizaje automático que permiten experimentos continuos.
El embalaje apretado de productos seleccionados de una pila no organizada sigue siendo en gran medida una tarea manual, aunque es fundamental para la eficiencia del almacén. La automatización de tales tareas es importante para la competitividad de las empresas y permite que las personas se centren en el trabajo menos exigente y físicamente exigente, según el equipo científico de Rutgers.
El estudio de Rutgers se centró en colocar objetos de un contenedor en una pequeña caja de envío y organizarlos bien. Esta es una tarea más difícil para un robot en comparación con solo recoger un objeto y soltarlo en una caja.
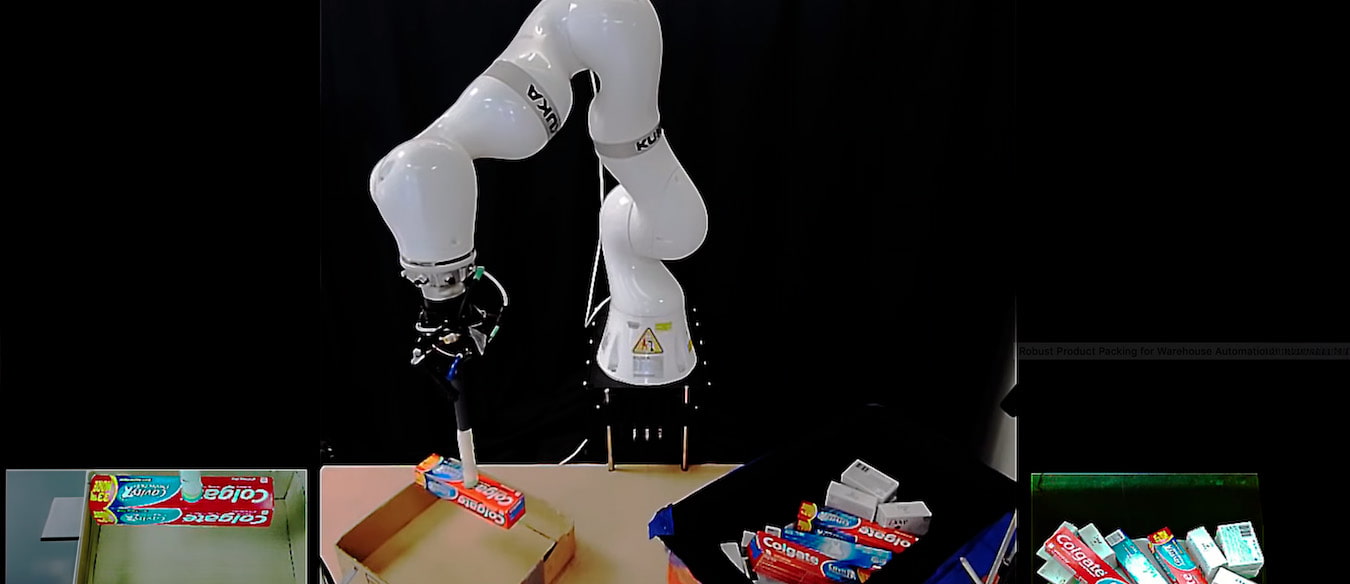
Los investigadores de Rutges desarrollaron software y algoritmos para su brazo robótico
Usaron datos visuales y una ventosa simple, que se dobla como un dedo para empujar objetos. El sistema resultante puede derribar objetos para obtener una superficie deseable para agarrarlos. Además, utiliza datos de sensores para atraer objetos hacia un área específica y empujar objetos juntos. Durante estas operaciones, utiliza el monitoreo en tiempo real para detectar y evitar fallas potenciales.
Dado que el estudio se centró en empacar objetos en forma de cubo, un próximo paso sería explorar el empacado de objetos de diferentes formas y tamaños. Otro paso sería explorar el aprendizaje automático mediante el sistema robótico después de que se le haya asignado una tarea específica.
Los autores principales son Rahul Shome y Wei N. Tang, estudiantes de doctorado en el Departamento de Ciencias de la Computación. Los coautores incluyeron estudiantes de doctorado Changkyu Song y Chaitanya Mitash, así como Hristiyan Kourtev, un programador científico en el Centro Rutgers para la Ciencia Cognitiva. El trabajo fue apoyado por contratos de investigación y subvenciones del centro de investigación Silicon Valley de JD.com y la Fundación Nacional de Ciencia.
Editorial Vodafone Business
Nuestro objetivo es construir una sociedad centrada en el progreso socioeconómico. Creemos que la tecnología y la conectividad pueden ayudar a mejorar la vida de millones de personas y empresas. Tenemos el compromiso de hacerlo reduciendo nuestro impacto ambiental y construyendo una sociedad digital inclusiva que respeta nuestro planeta.